目录
- 一.数据通信方式
- 1.串行与并行通信
- 2.全双工、半双工及单工通讯
- 3.同步通讯与异步通讯
- 二.串口通讯协议
- STM32串口简介
- 1.物理层
- 1)RS232标准
- 2)USB转串口(重点)
- 3原生的串口到串口
- 2.协议层
- 1)通讯的起始和停止信号
- 2)有效数据
- 3)数据校验
- 三.USART 功能框图(超级重要)
- 1.功能引脚:
- 2.数据寄存器(重点)
- 3.控制单元(重点)
- 4. USART初始化结构体
- 四.USART1收发通信实验
- 关于printf函数,scanf函数 重定向问题
- 实验效果
- 五.向单片机发送指令点亮LED
- 实验效果
一.数据通信方式
1.串行与并行通信
按数据传送的方式,通讯可分为串行通讯与并行通讯。
- 串行通讯:是指设备之间通过一根数据信号线,地线以及控制信号线,按数据位形式一位一位地传输数据的通讯方式,同一时刻只能传输一位(bit)数据。
- 并行通讯:是指使用 8、16、32 及 64 根或更多的数据线(有多少信号为就需要多少信号位)进行传输的通讯方式,可以同一时刻传输多个数据位的数据。
串行通讯与并行通讯的特性对比:

并行可以同时发送多位数据所以速度比串行的速度要快很多,但并行要的数据线也更多相对成本会更高,而且并行传输对同步要求较高,且随着通讯速率的提高,信号干扰的问题会显著影响通讯性能。
2.全双工、半双工及单工通讯
-
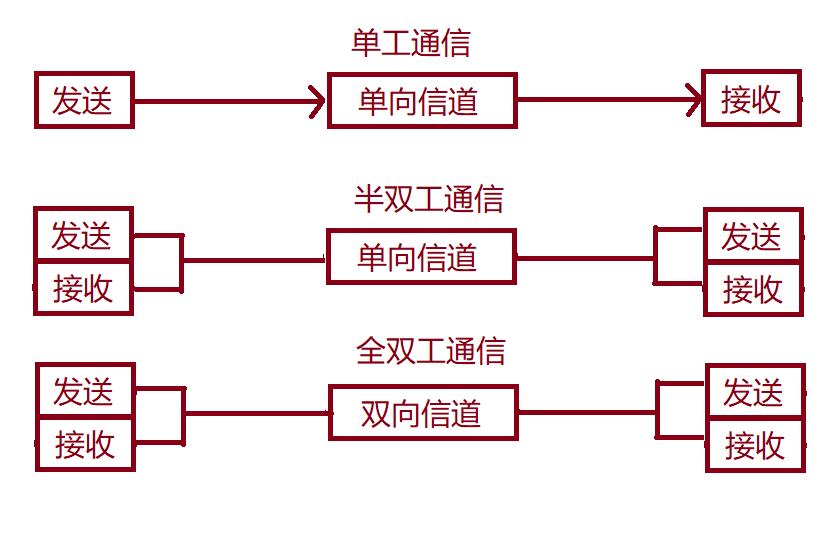
单工通信:信息只能单方向传输的工作方式,一个固定为发送设备,另一个固定为接收设备,发送端只能发送信息不能接收信息,接收端只能接收信息不能发送信息,只需一根信号线
-
半双工通信:可以实现双向的通信,但不能在两个方向上同时进行,必须轮流交替进行,其实也可以理解成一种可以切换方向的单工通信,同一时刻必须只能一个方向传输,只需一根数据线
-
全双工通信:在同一时刻,两个设备之间可以同时收发数据,全双工方式无需进行方向的切换,这种方式要求通讯双方均有发送器和接收器,同时,需要2根数据线。
常见串口通信接口:

3.同步通讯与异步通讯
- 同步通讯:收发设备双方会使用一根信号线表示时钟信号,在
时钟信号的驱动下双方进行协调,同步数据,通讯中通常双方会统一规定在时钟信号的上升沿或下降沿对数据线进行采样,对应时钟极性与时钟相位。
I2C 的同步通信:
- 异步通讯:不需要时钟信号进行数据同步,它们直接在数据信号中穿插一些同步用的信号位,或者把主体数据进行打包,以数据帧(串口:起始位 数据 校验位(可以没有) 停止位)的格式传输数据,某些通讯中还需要双方约定数据的传输速率(波特率),以便更好地同步。

二.串口通讯协议
通讯协议:分为物理层和协议层。物理层规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输(通俗一点就是硬件部分)。协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准(软件)。
STM32串口简介
USART-通用同步异步收发器(Universal Synchronous Asynchronous Receiver and Transmitter)是一个串行通信设备,可以灵活地与外部设备进行全双工数据交换。有别于 USART 还有一个UART(Universal Asynchronous Receiver and Transmitter),它是在 USART 基础上裁剪掉了同步通信功能(时钟同步),只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是 UART。
串行通信一般是以帧格式传输数据,即是一帧一帧的传输,每帧包含有起始信号、数据信息、校验信息(由我们自己设置)、停止信号。
1.物理层
1)RS232标准
很多单片机内部例如我们所用的STM32,以及一些传感器一般都是TTL电平。
RS232是一种串行数据传输形式,称其为串行连接,最经典的标志就是 9 针孔的 DB9 电缆RS232电压表示逻辑 1 ,0的范围大极大的增强了容错率,主要用于工业设备直接通信。
由上图可知,TLL与RS-232标准逻辑相反,而且电平也大不相同,若单片机与单片机或其他设备TLL设备通信采用RS-232通信(DB9),肯定先要进行电平的转化TLL->RS232 RS232->TTL
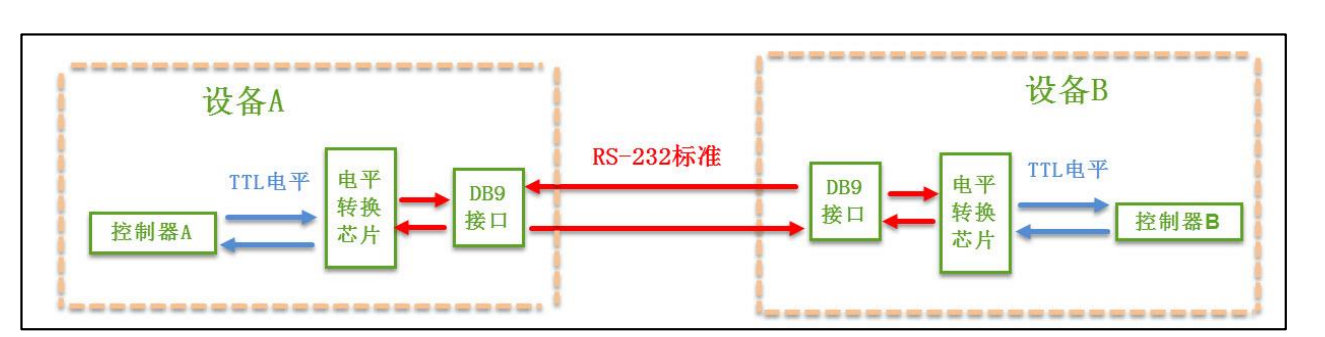
两个通讯设备的“DB9 接口”之间通过串口信号线建立起连接,串口信号线中使用“RS-232 标准”传输数据信号。由于 RS-232 电平标准的信号不能直接被控制器直接识别,所以这些信号会经过一个“电平转换芯片”转换成控制器能识别的“TTL 标准”的电平信号,才能实现通讯。

BD9串口线:
2)USB转串口(重点)
至于为什么是重点因为这是我实验用的方式重点介绍:
USB转串口:主要用于设备(STM32)与电脑通信
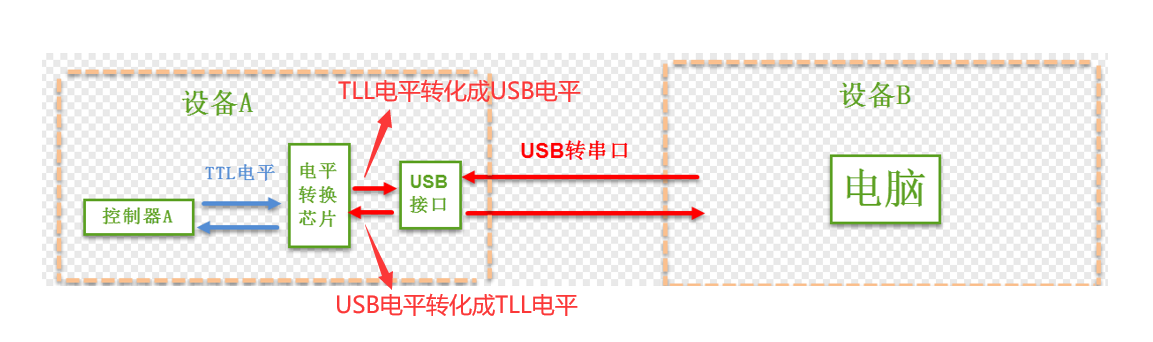
电平转换芯片一般有CH340、PL2303、CP2102、FT232
使用的时候电脑要按照电平转换芯片的驱动(虚拟出一个串口)我这里装的是CH340
原理图:一定要搞懂下面这张图
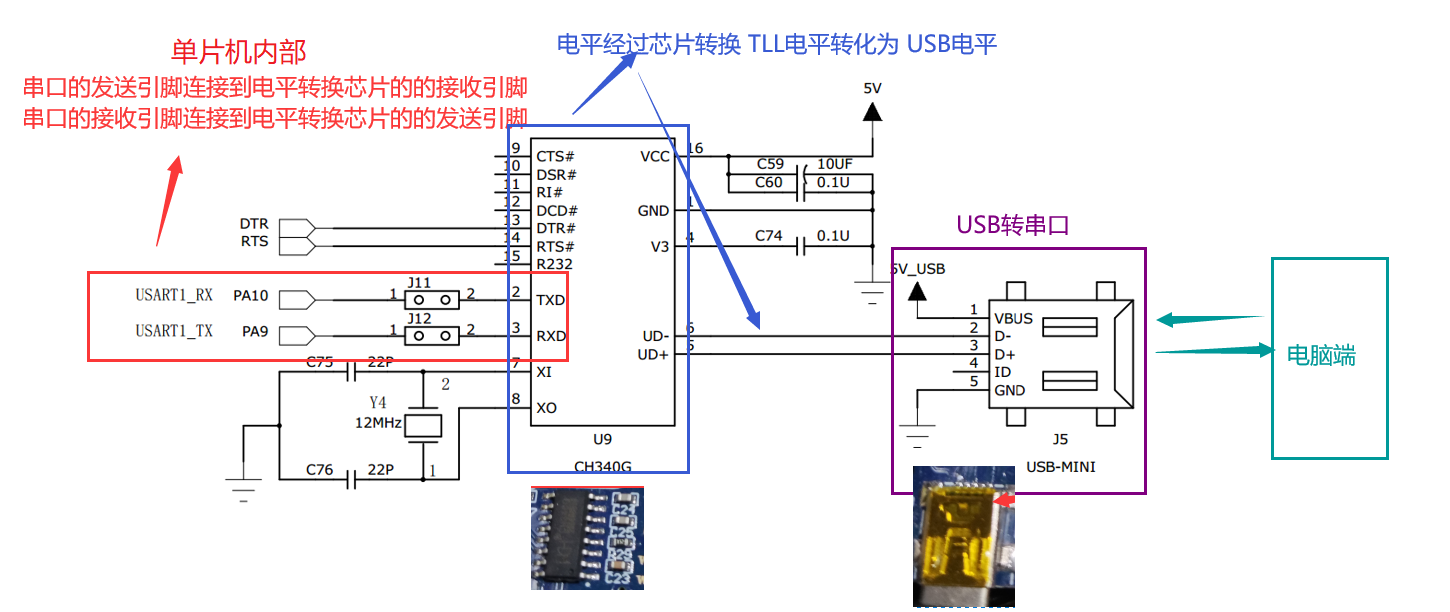
这里是拿的野火的原理图,因为我觉得原子的图画的不好,不过原理是一致的。
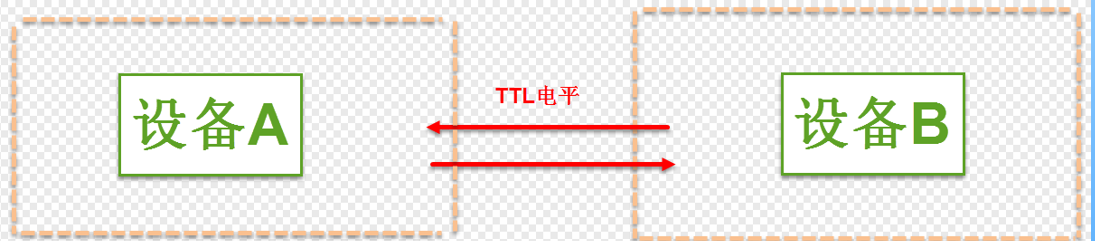
3原生的串口到串口
原生的串口通信主要是控制器跟串口的设备或者传感器通信他们但是TLL电平,不需要经过电平转换芯片来转换电平,直接就用TTL电平通信,GPS模块、GSM模块、串口转WIFI模块、HC04蓝牙模块
2.协议层
串口通讯的协议层中,规定了数据包的内容,它由启始位、主体数据、校验位以及停止位组成,通讯双方的数据包格式要约定一致(一样的起始位 数据 校验位 停止位)才能正常收发数据
1)通讯的起始和停止信号
串口通讯的一个数据包从起始信号开始,直到停止信号结束。数据包的起始信号由一个逻辑 0 的数据位表示,而数据包的停止信号可由 0.5、1、1.5 或 2 个逻辑 1 的数据位表示
1个停止位:停止位位数的默认值。
2个停止位:可用于常规USART模式、单线模式以及调制解调器模式。
0.5个停止位:在智能卡模式下接收数据时使用。
1.5个停止位:在智能卡模式下发送和接收数据时使用。
2)有效数据
在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效数据的长度常被约定为 5、6、7 或 8 位长
3)数据校验
-
偶校验:校验位使得一帧中的7或8个LSB数据以及校验位中’1’的个数为偶数。
例如:数据=00110101,有4个’1’,如果选择偶校验(在USART_CR1中的PS=0),校验位将是’0’,最后数据检验如果数据有偶数个1则数据传输没有出错(但不是绝对的,如果同时两个数据为发送错误(0变成1)则还是偶数个1)
-
奇校验:此校验位使得一帧中的7或8个LSB数据以及校验位中’1’的个数为奇数。
例如:数据=00110101,有4个’1’,如果选择奇校验(在USART_CR1中的PS=1),校验位将是’1’,最后数据检验如果数据有奇数个1则数据传输没有出错,但同样不是绝对的(同时两个1变成0)
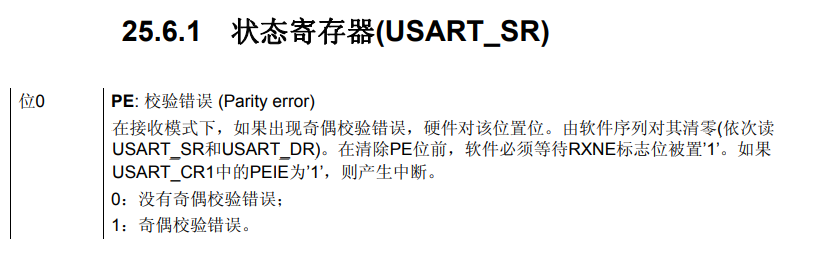
传输模式:如果USART_CR1的PCE位被置位,如果奇偶校验失败USART_SR寄存器中的PE标志被置’1’,并且如果USART_CR1寄存器的PEIE在被预先设置的话,中断产生(我们可以在相应的中断服务函数中,写处理校验失败的代码)

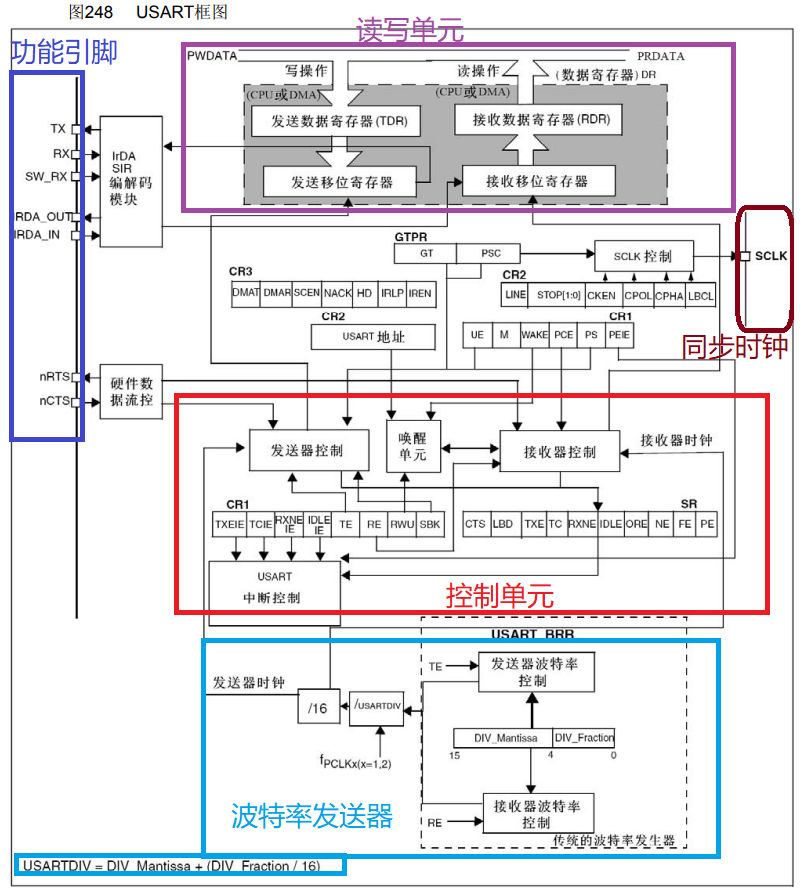
三.USART 功能框图(超级重要)
只要把功能框图分析透彻,写代码不就是信手拈来,一定一定要掌握!!!
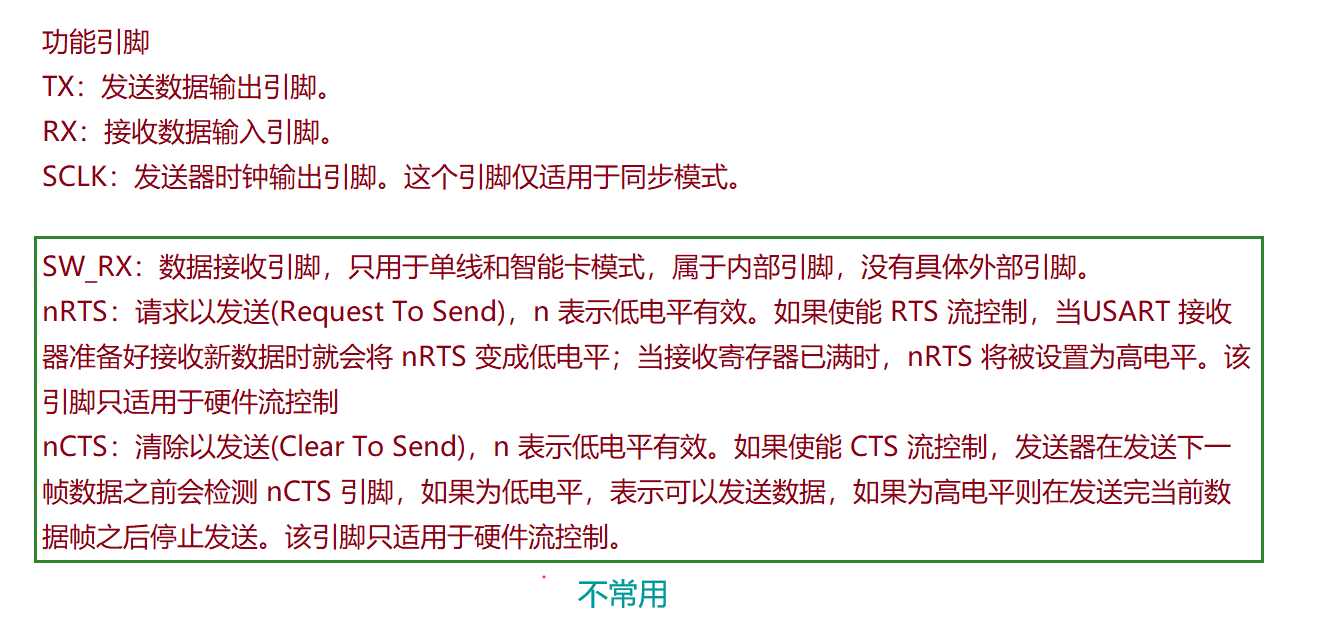
1.功能引脚:
2.数据寄存器(重点)
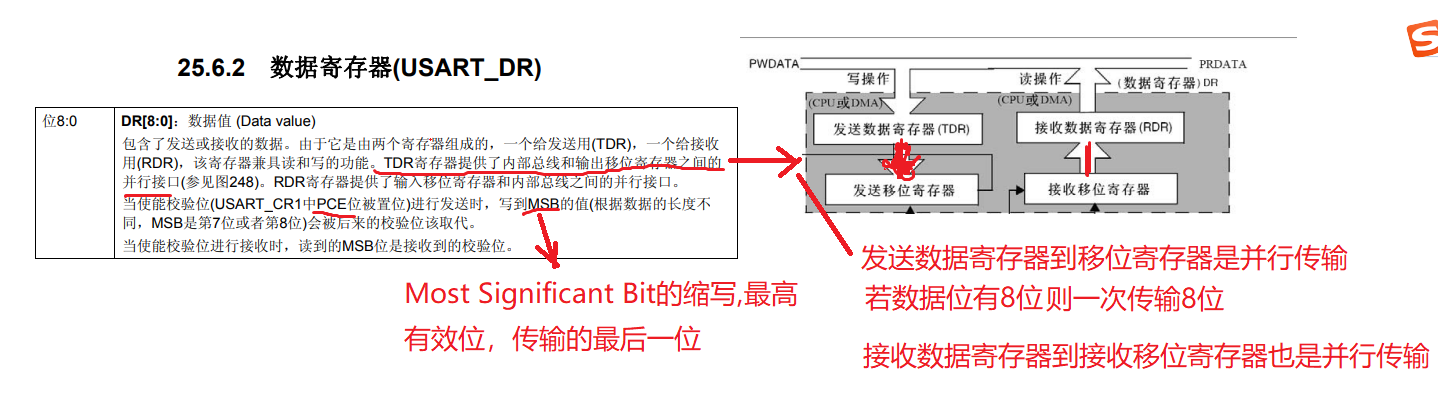

下面这张图也非常重要理解理解!!
3.控制单元(重点)
- 发送器
发送器根据M位的状态发送8位或9位的数据字。当发送使能位(TE)被设置时,发送移位寄存器中的数据在TX脚上输出,相应的时钟脉冲在CK脚上输出。
一个字符帧发送需要三个部分:起始位+数据帧(可能有校验位)+停止位。每个字符(一个数据帧)之前都有一个低电平的起始位,之后跟着的停止位,其数目可配置,数据帧就是我们要发送的 8 位或 9 位数据,数据是从最低位开始传输的,停止位是一定时间周期的高电平。
配置步骤:
-
通过在USART_CR1寄存器上置位UE位来激活USART

-
编程USART_CR1的M位来定义字长。

-
在USART_CR2中编程停止位的位数。
-
如果采用多缓冲器通信,配置USART_CR3中的DMA使能位(DMAT)。按多缓冲器通信中的描述配置DMA寄存器,关于DMA下期再详细讲解。

-
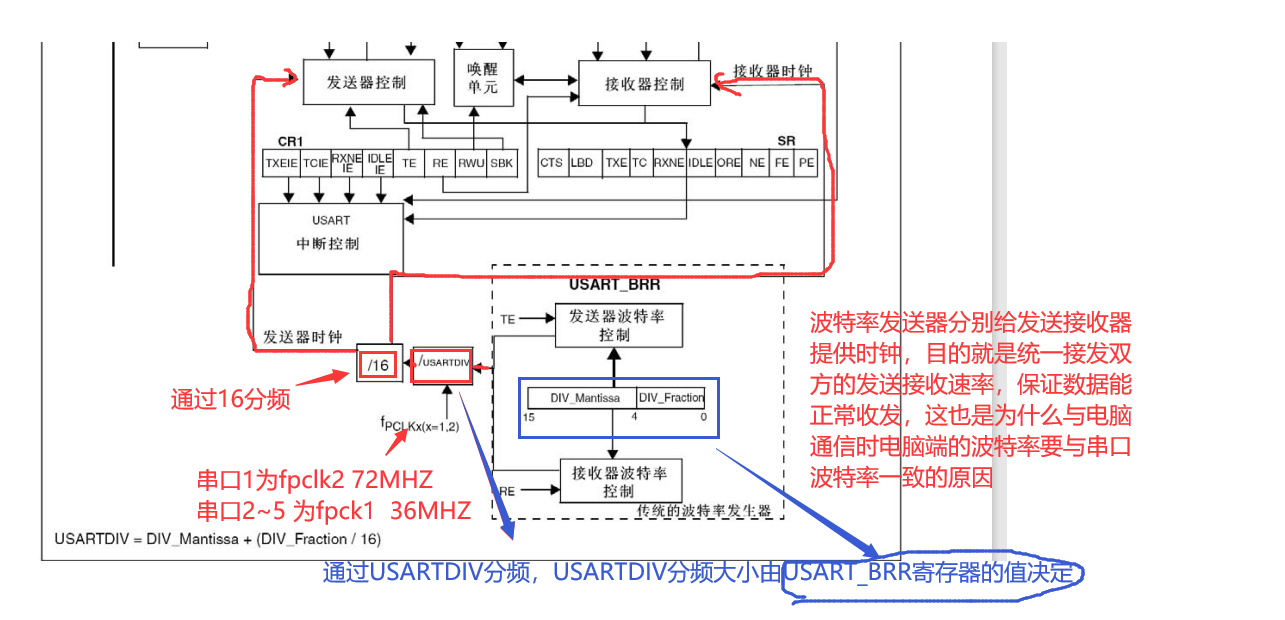
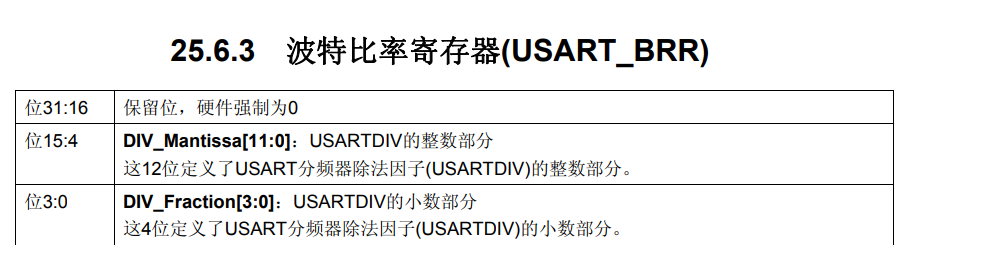
利用USART_BRR寄存器选择要求的波特率。
发送和接收由一共用的波特率发生器驱动,当发送器和接收器的使能位分别置位时,分别为其产生时钟。
这里举个例子:以115200波特率
-
设置USART_CR1中的TE位,
发送一个空闲帧帧(一个数据帧长度的高电平)作为第一次数据发送。
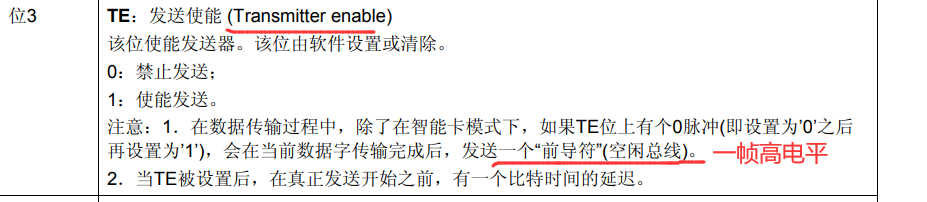
-
把要发送的数据写进USART_DR寄存器(此动作清除TXE位)。在只有一个缓冲器的情况下,对每个待发送的数据重复步骤7。

-
在USART_DR寄存器中写入最后一个数据字后,要等待TC=1,它表示最后一个数据帧的传输结束(移位寄存器中的数据全部发送完毕)。当需要关闭USART或需要进入停机模式之前,需要确认传输结束,避免破坏最后一次传输。

深入理解TXE位与TC位:
清零TXE位总是通过对数据寄存器的写操作(CPU 或 DMA)来完成的,当TXE位已经被硬件置1它表明:
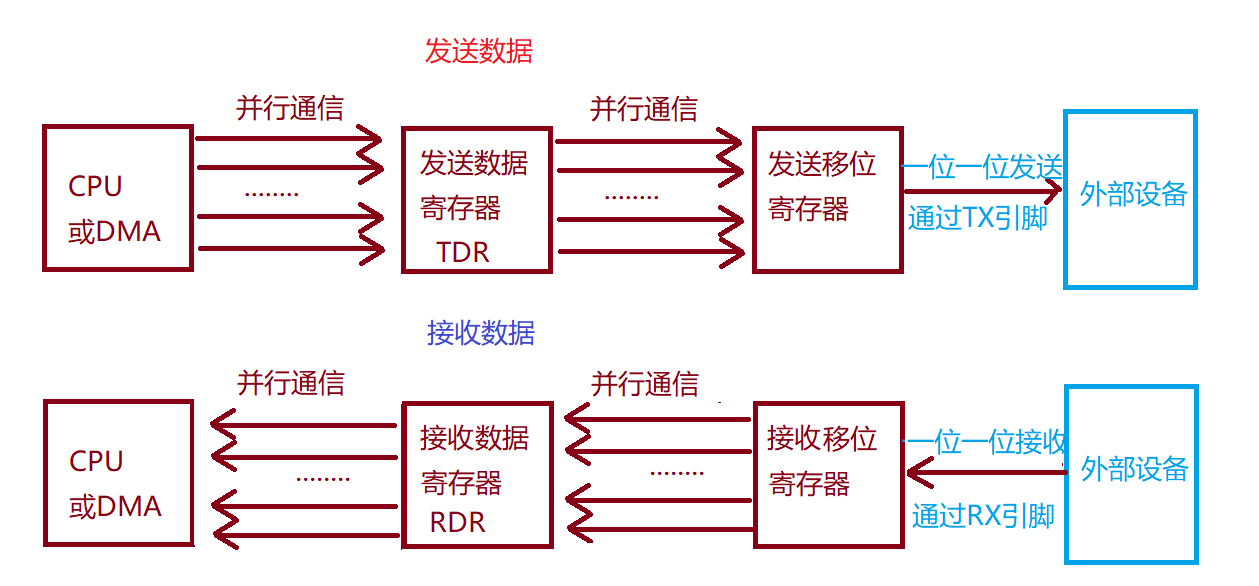
● 数据已经从TDR移送到移位寄存器,数据发送已经开始(发送移位寄存器正在一位一位向外传输数据)
● TDR寄存器被清空
● 下一个数据可以被写进USART_DR寄存器而不会覆盖先前的数据如果TXEIE位被设置,此标志将产生一个中断。
如果此时USART正在发送数据(发送移位寄存器正在一位一位向外传输数据),对USART_DR寄存器的写操作把数据存进TDR寄存器,并在当前传输结束时把该数据复制进移位寄存器,也就是说移位寄存器里面的数据并不会被覆盖,所以我觉得只要你发送一帧数据等待TXE置1,就算是发送多帧数据时最后也不用等待TC=1。
如果此时USART没有在发送数据,处于空闲状态,对USART_DR寄存器的写操作直接把数据放进移位寄存器,数据传输开始,TXE位立即被置起。
当一帧发送完成时(停止位发送后)并且设置了TXE位,TC位被置起,如果USART_CR1寄存器中的TCIE位被置起时,则会产生中断
使用下列软件过程清除TC位:
1.读一次USART_SR寄存器;
2.写一次USART_DR寄存器。
TC位也可以通过软件对它写’0’来清除。此清零方式只推荐在多缓冲器通信模式下使用
- 接收器
如果将 USART_CR1 寄存器的 RE 位置 1,使能 USART 接收,使得接收器在 RX 线开始搜索起始位。在确定到起始位后就根据 RX 线电平状态把数据存放在接收移位寄存器内。接收完成后就把接收移位寄存器数据移到 RDR 内,并把 USART_SR 寄存器的 RXNE 位置1,同时如果 USART_CR2 寄存器的 RXNEIE 置 1 的话可以产生中断。
当一字符被接收到时,
● RXNE位被置1。它表明移位寄存器的内容被转移到RDR。换句话说,数据已经被接收并且可以被读出。
● 如果RXNEIE位被设置,产生中断。
● 在多缓冲器通信时,RXNE在每个字节接收后被置起,并由DMA对数据寄存器的读操作而清零。
● 在单缓冲器模式里,由软件读USART_DR寄存器完成对RXNE位清除,RXNE标志也可以通过对它写0来清除。RXNE位必须在下一字符接收结束前(接收移位寄存器接收满)被清零(要将数据读出),以避免溢出错误(移位寄存器的数据会被覆盖)。
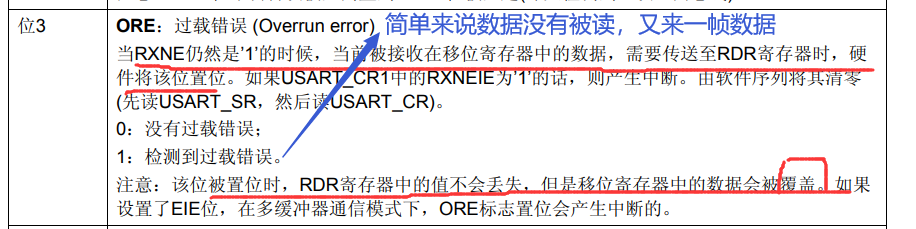
溢出错误
如果RXNE还没有被复位(还没有读出DR寄存器的数据),又接收到一个字符,则发生溢出错误,数据只有当RXNE位被清零后才能从移位寄存器转移到RDR寄存器。RXNE标记是接收到每个字节后被置位的。如果下一个数据已被收到或先前DMA请求还没被服务时,RXNE标志仍是1,溢出错误产生。
当溢出错误产生时:
● ORE位被置位。
● RDR内容将不会丢失。读USART_DR寄存器仍能得到先前的数据。
● 移位寄存器中以前的内容将被覆盖。随后接收到的数据都将丢失。
● 如果RXNEIE位被设置或EIE和DMAR位都被设置,中断产生。
● 顺序执行对USART_SR和USART_DR寄存器的读操作,可复位ORE位
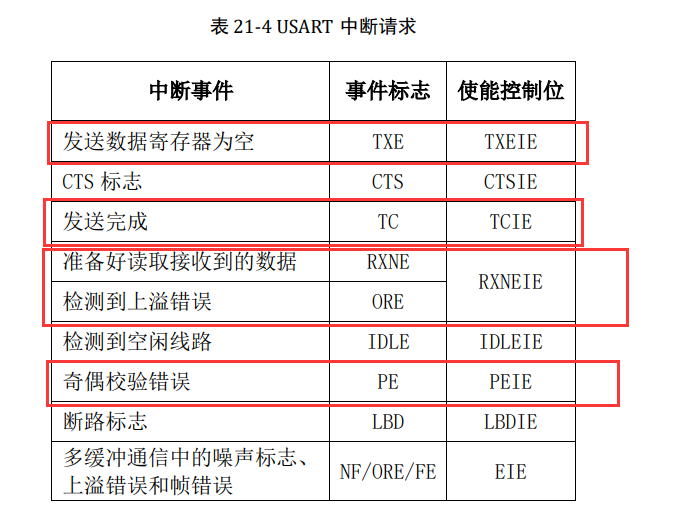
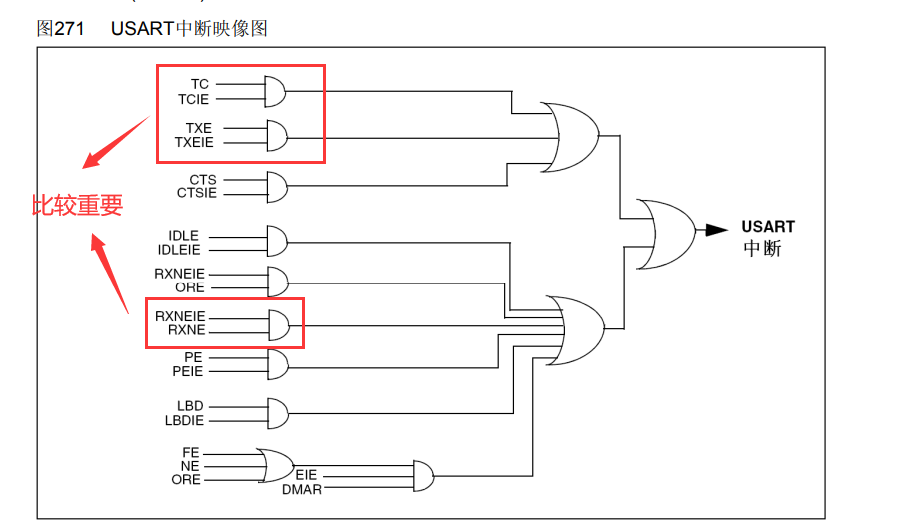
USART相关中断:
4. USART初始化结构体
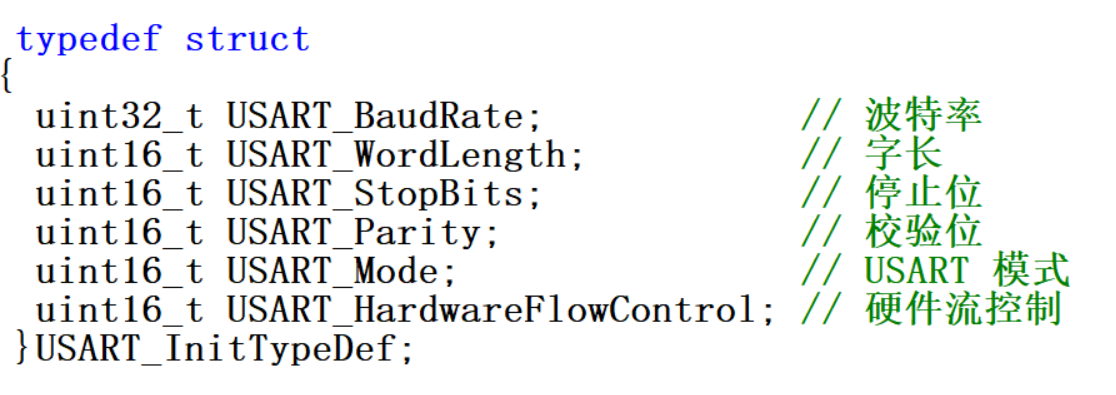
上面结构体成员要配置的哪个寄存器哪一位前面基本都讲了这里不在赘述。
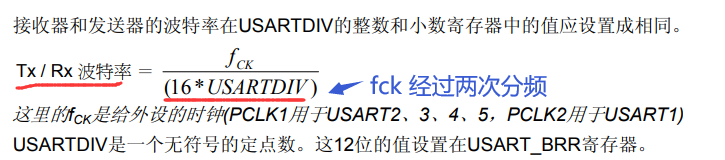
1) USART_BaudRate:波特率设置。一般设置为 2400、9600、19200、115200。标准库函数会自己计算计算得到 USARTDIV 值,从而写入USART_BRR 寄存器。
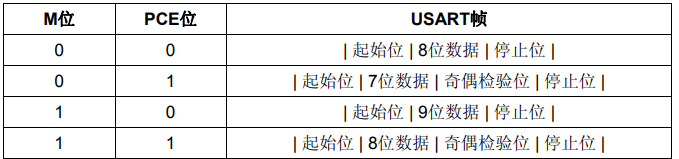
2) USART_WordLength:数据帧字长,可选 8 位或 9 位。它设置了USART_CR1 寄存器的 M 位的值。如果没有使能奇偶校验位,一般使用 8 数据位;如果使能了奇偶校验则一般设置为 9 数据位,最后一位是奇偶校验位。
3) USART_StopBits:停止位设置,可选 0.5 个、1 个、1.5 个和 2 个停止位,它设定USART_CR2 STOP位,一般我们选择 1 个停止位。
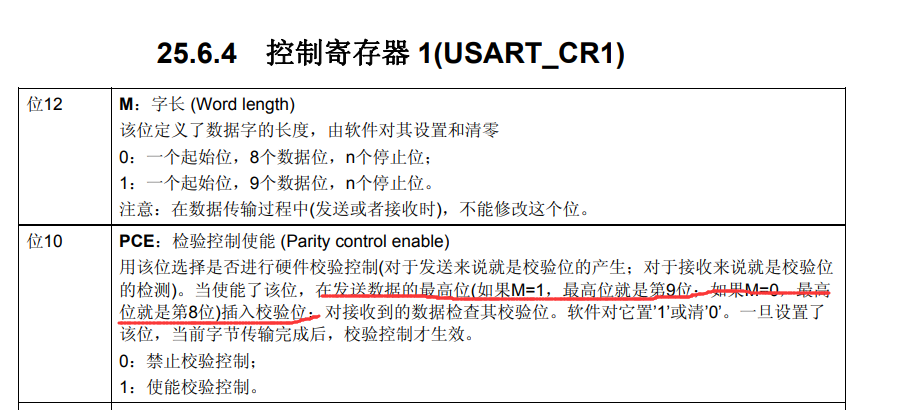
4) USART_Parity : 奇 偶 校 验 控 制 选 择 ,USART_CR1 寄存器的 PCE 位和 PS 位的值。
5) USART_Mode:USART 模式选择,有 USART_Mode_Rx 和 USART_Mode_Tx,允许使用逻辑或运算选择两个,USART_CR1 寄存器的 RE 位和 TE 位。
6) USART_HardwareFlowControl:硬件流控制选择,只有在硬件流控制模式才有效,可选有⑴使能 RTS、⑵使能 CTS、⑶同时使能 RTS 和 CTS、⑷不使能硬件流。
四.USART1收发通信实验
编程要点:
1) 使能 RX 和 TX 引脚 GPIO 时钟和 USART 时钟;
2) 初始化 GPIO,并将 GPIO 复用到 USART 上;
3) 配置 USART 参数初始化结构体;
4) 配置中断控制器并使能 USART 接收中断;
5) 使能 USART;
6) 在 USART 接收中断服务函数实现数据接收和发送。
usart.h
相关宏定义与函声明:
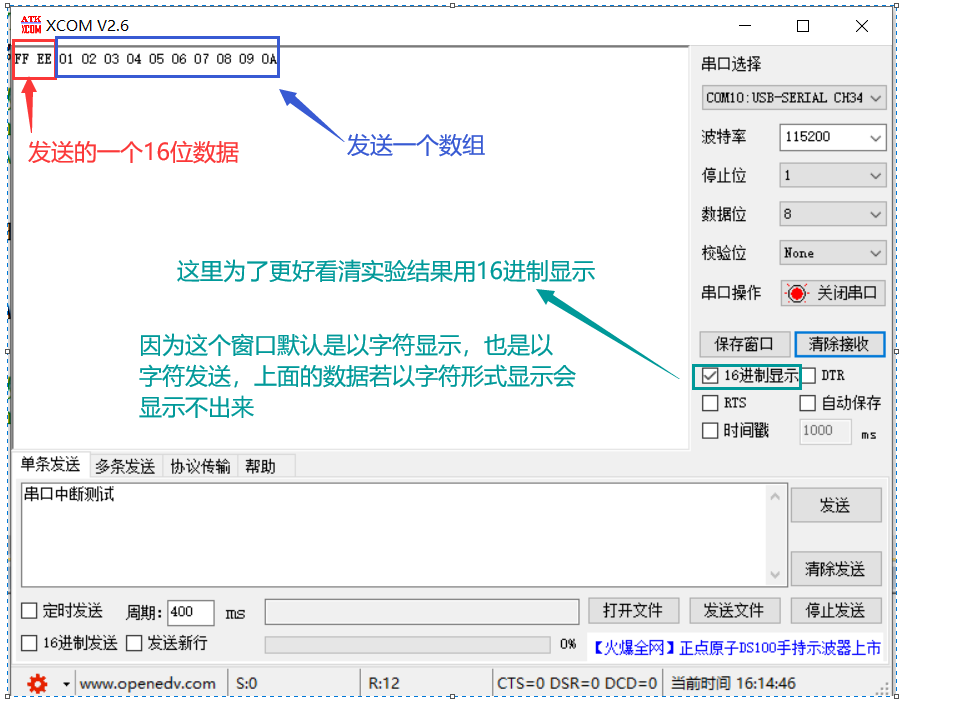
#ifndef _USART_H#define _USART_H#include "stm32f10x.h"#include <stdio.h>#define DEBUG_USART1 1#define DEBUG_USART2 0#if DEBUG_USART1 // 串口1-USART1#define DEBUG_USARTx USART1#define DEBUG_USART_CLK RCC_APB2Periph_USART1#define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd#define DEBUG_USART_BAUDRATE 115200// USART GPIO 引脚宏定义#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd #define DEBUG_USART_TX_GPIO_PORT GPIOA #define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9#define DEBUG_USART_RX_GPIO_PORT GPIOA#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10#define DEBUG_USART_IRQ USART1_IRQn#define DEBUG_USART_IRQHandler USART1_IRQHandler#elif DEBUG_USART2 // 串口2-USART2#define DEBUG_USARTx USART2#define DEBUG_USART_CLK RCC_APB1Periph_USART2#define DEBUG_USART_APBxClkCmd RCC_APB1PeriphClockCmd#define DEBUG_USART_BAUDRATE 115200// USART GPIO 引脚宏定义#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd #define DEBUG_USART_TX_GPIO_PORT GPIOA #define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_2#define DEBUG_USART_RX_GPIO_PORT GPIOA#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_3#define DEBUG_USART_IRQ USART2_IRQn#define DEBUG_USART_IRQHandler USART2_IRQHandler#endifvoid USART_Config(void);void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t date);void Usart_SendString( USART_TypeDef * pUSARTx, char *str);void Usart_SendHalfWord( USART_TypeDef * pUSARTx, uint16_t date);void Usart_SendArray(USART_TypeDef * pUSARTx,uint8_t *arr,uint16_t num);#endif usart.c
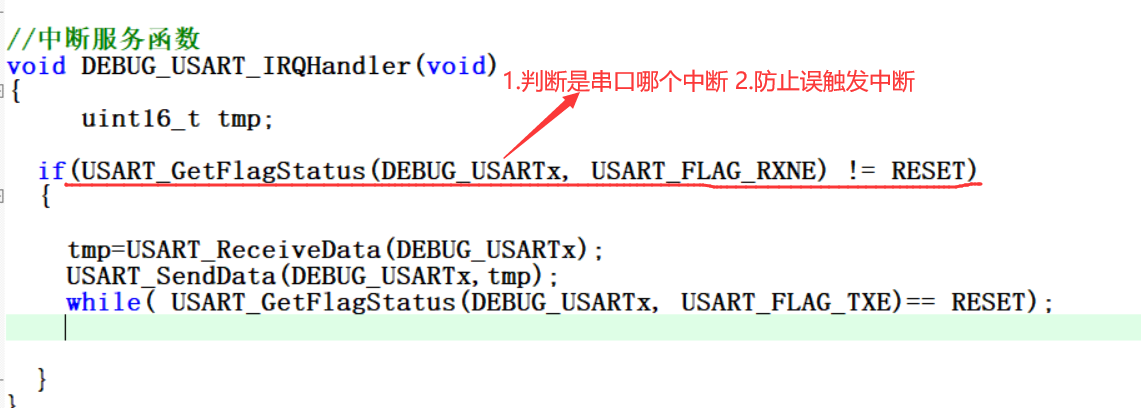
#include "usart.h"#include "led.h"static void NVIC_Configuration(void){ NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitStructure.NVIC_IRQChannel =DEBUG_USART_IRQ; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority =0x01; NVIC_InitStructure.NVIC_IRQChannelSubPriority =0x01; NVIC_InitStructure.NVIC_IRQChannelCmd =ENABLE; NVIC_Init(&NVIC_InitStructure);}void USART_Config(void){ GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; // 打开串口GPIO的时钟 DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE); // 打开串口外设的时钟 DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE); // 将USART Tx的GPIO配置为推挽复用模式 GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure); // 将USART Rx的GPIO配置为浮空输入模式 GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure); // 配置串口的工作参数 // 配置波特率 USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE; // 配置 针数据字长 USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 配置停止位 USART_InitStructure.USART_StopBits = USART_StopBits_1; // 配置校验位 USART_InitStructure.USART_Parity = USART_Parity_No ; // 配置硬件流控制 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 配置工作模式,收发一起 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 完成串口的初始化配置 USART_Init(DEBUG_USARTx, &USART_InitStructure); //中断配置 NVIC_Configuration(); //开启串口接收中断 USART_ITConfig(DEBUG_USARTx,USART_IT_RXNE, ENABLE); //使能串口 USART_Cmd(DEBUG_USARTx, ENABLE);}//发送一个字节void Usart_SendByte(USART_TypeDef * pUSARTx,uint8_t date){ USART_SendData(pUSARTx,date); while( USART_GetFlagStatus(pUSARTx,USART_FLAG_TXE)== RESET);}//发送一个16位的数据void Usart_SendHalfWord(USART_TypeDef * pUSARTx,uint16_t date){ uint16_t tmp_h; uint16_t tmp_l; tmp_h =date>>0x08; tmp_l =date & 0xff; Usart_SendByte(pUSARTx,tmp_h); Usart_SendByte(pUSARTx,tmp_l);}//发送一个8位的数组void Usart_SendArray(USART_TypeDef * pUSARTx,uint8_t *arr,uint16_t num){ while(num--) { Usart_SendByte( pUSARTx ,*arr++); } while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TC)== RESET);}//发送字符串void Usart_SendString( USART_TypeDef * pUSARTx, char *str){ while( *str!='0' ) { Usart_SendByte( pUSARTx, *str++); } while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TC)== RESET);}///重定向c库函数printf到串口,重定向后可使用printf函数int fputc(int ch, FILE *f){ USART_SendData(DEBUG_USARTx, (uint8_t) ch); while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET); return (ch);}///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数int fgetc(FILE *f){ while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET); return (int)USART_ReceiveData(DEBUG_USARTx);}//中断服务函数void DEBUG_USART_IRQHandler(void){ uint16_t tmp;if(USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) != RESET) { tmp=USART_ReceiveData(DEBUG_USARTx); USART_SendData(DEBUG_USARTx,tmp);while( USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE)== RESET); }}
main.c
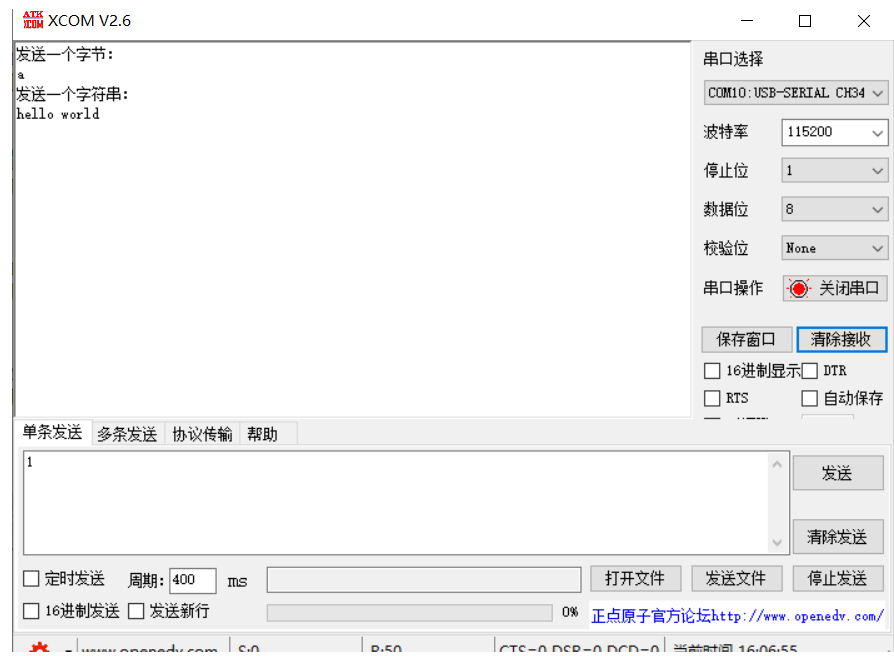
#include "stm32f10x.h"#include "led.h"#include "usart.h"#include <string.h>#define SOFT_DELAY Delay(0x0FFFFF);void Delay(__IO u32 nCount); int main(void){ uint16_t ch; uint8_t arr[10]={1,2,3,4,5,6,7,8,9,10}; LED_GPIO_Config(); USART_Config(); //发送一个字符 printf("发送一个字节:rn"); Usart_SendByte(DEBUG_USARTx ,97); printf("rn"); //发送一个16位数据 Usart_SendHalfWord(DEBUG_USARTx,0xffee); //发送一个数组 Usart_SendArray(DEBUG_USARTx, arr,10); //发送一个字符串 printf("发送一个字符串:rn"); Usart_SendString( DEBUG_USARTx, "hello worldrn"); while(1); } 关于printf函数,scanf函数 重定向问题
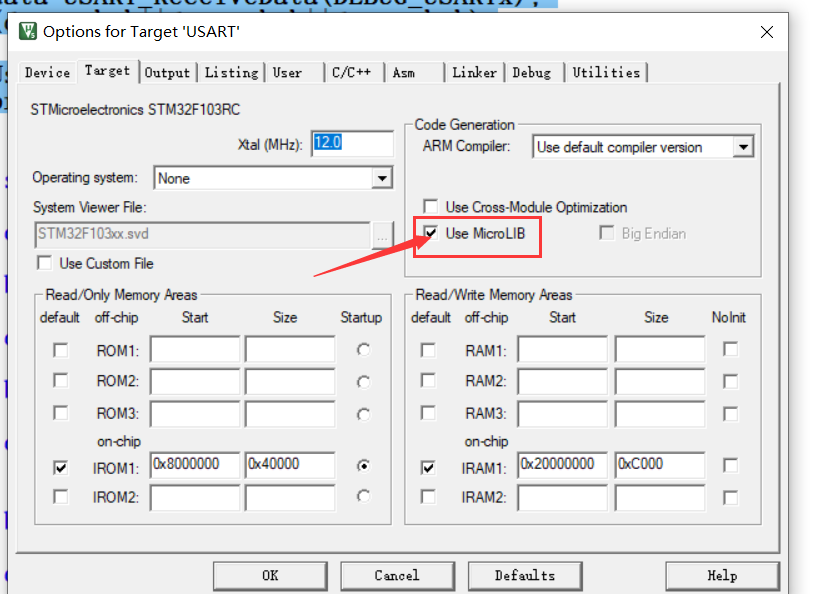
MicroLib是缺省c库的备选库,它可装入少量内存中,与嵌入式应用程序配合使用,且这些应用程序不在操作系统中运行。
如果要使用printf函数输出数据到串口,printf函数默认是输出到屏幕(标准输出流—stdout),所以要重定把输出流改成USART1串口1
当使用 printf 函数时,自动会调用 fputc 函数,而 fputc 函数内又将输出 设备重定义为 STM32 的 USART1,所以要输出的数据就会在串口 1 上输出
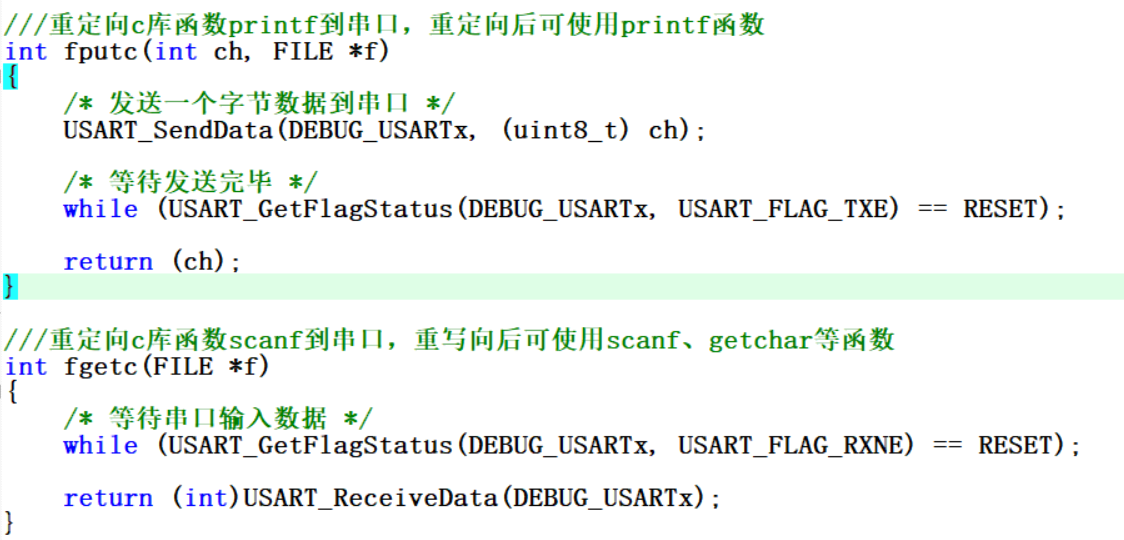
scanf函数(默认键盘输入,我们要重定向到串口接收)类似我就不说了。
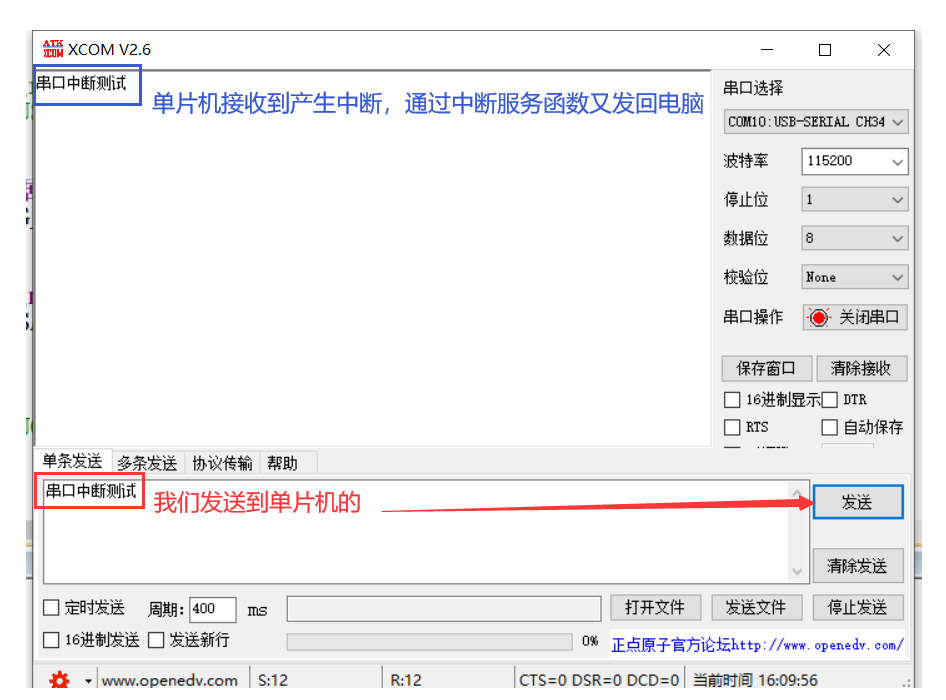
实验效果
五.向单片机发送指令点亮LED
main.c
#include "stm32f10x.h"#include "led.h"#include "usart.h"#include <string.h>int main(){ uint16_t ch; LED_GPIO_Config(); USART_Config(); printf("请输入指令:rn"); printf("1:红灯 2:绿灯 3:红绿灯 其他:指令错误rn"); while(1) { ch=getchar(); switch(ch) { case '1': GPIOA->ODR^=GPIO_Pin_8; printf("1:红灯rn"); break; case '2': printf("2:绿灯rn"); GPIOD->ODR^=GPIO_Pin_2; break; case '3': printf("3:红绿灯rn"); GPIOA->ODR^=GPIO_Pin_8; GPIOD->ODR^=GPIO_Pin_2; break; default: printf("指令错误rn"); break; } } }实验效果
串口-电脑向单片机发送指令点亮LED灯
免责声明:本平台仅供信息发布交流之途,请谨慎判断信息真伪。如遇虚假诈骗信息,请立即举报
举报